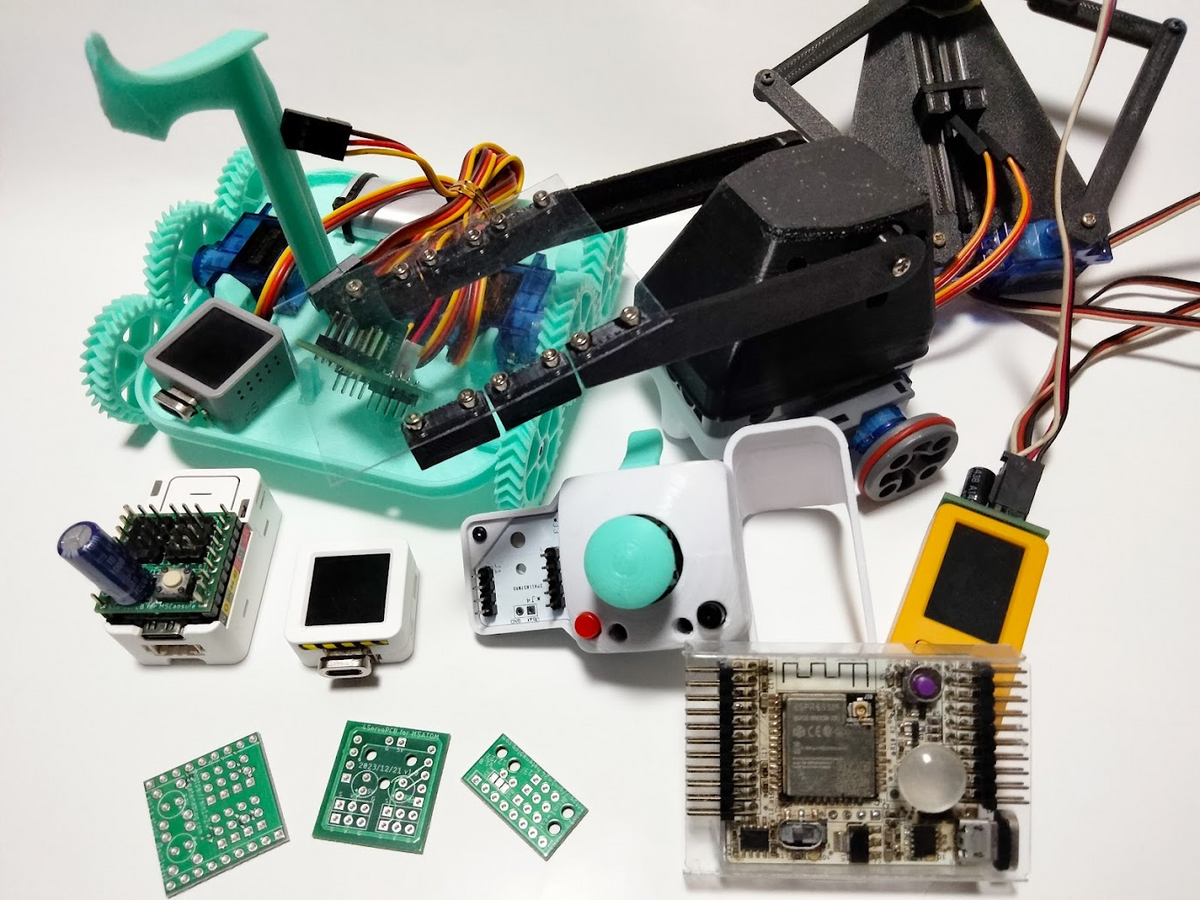
スイッチサイエンス感謝祭でミニかわロボの展示して嬉しいことに好評でしたが、その際に使っているやまば歯車についての質問を多く頂いたので記事にしてみます。

↑ やまば歯車を搭載したロボット。動いている様子は前の記事に動画があります。
歯車の種類とやまば歯車についてはKHKさんとはぐるマガジンさんの記事詳しいですが、取敢えずはそういう種類の頑丈な歯車があると覚えて頂ければ十分です。
スイッチサイエンスさんの年度末大感謝祭に展示・ライトニングトークします!
スイッチサイエンス 年度末大感謝祭 - connpass @2/23(金祝)
展示内容はミニかわロボ4台のデモ・体験と、前記事のサーボ基板や小型コントローラ (ProtoPedia記事)も現地特価で販売予定です。間に合えばチラシとか作りたい…。
ライトニングトークはミニかわロボの紹介しながら、盛り上がりそうな内容にするつもりです。
2/9時点で一般枠残り7なので、興味ある方はお早めに!
【2/21】おしながき追加しました

M5StickCPlus向 3サーボ接続基板 — スイッチサイエンス
M5Capsule向 5サーボ接続基板 — スイッチサイエンス
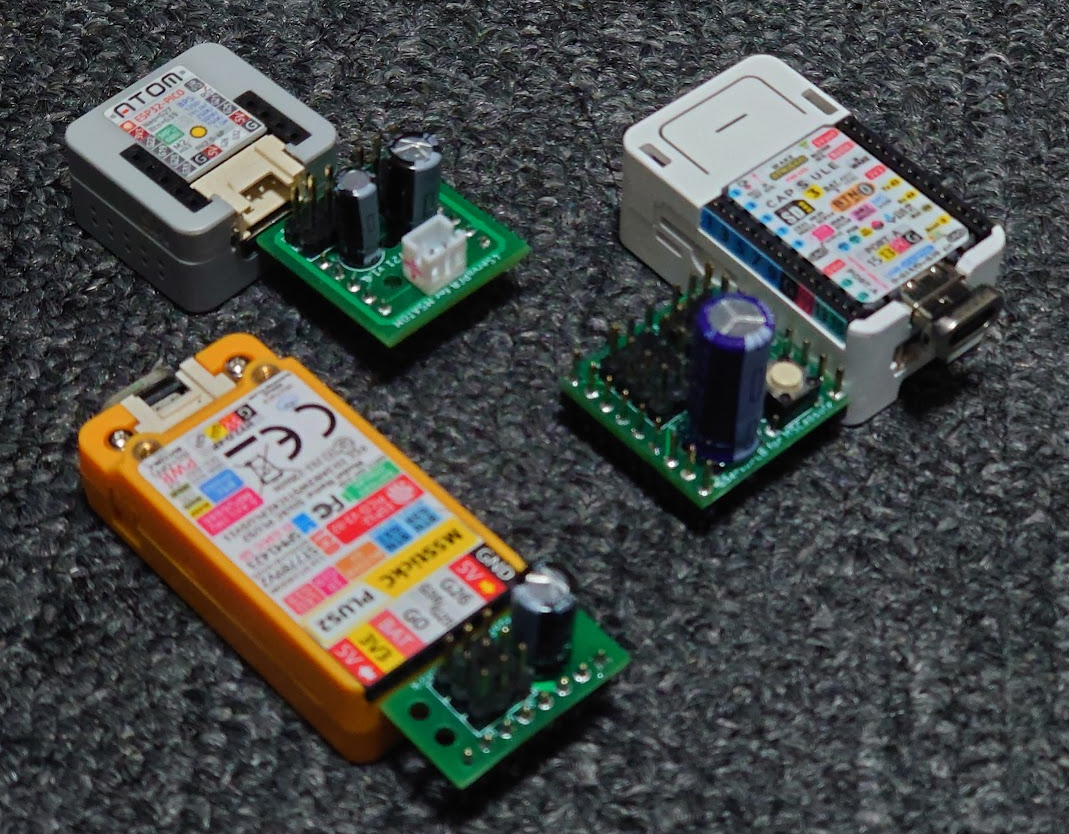
各基板に共通する特徴としては以下の通りです。
・サーボの電源は5Vでなくバッテリー(複数同時にストールさせる用途を想定)
・バッテリーor/and3.3ラインに電解コンデンサを接続可能
・サーボの電源ラインは極力太く(5サーボでは幅1mm目標)
・必須端子を外周側に配置しており、裏面にライトアングル使用すれば低背化可能
・M5ATOM用基板はコネクタ用端子があり、自己責任でバッテリー接続可能
・M5Capsule用基板は電源スイッチ用端子があり、外付けスイッチで電源on/off可能。
・M5Stick/Atom用基板は固定穴を用意し、M5側を交換しやすい