脱輪しました!以上!
続きを読む制御の目指すところについて
かわロボに制御入れてる方、少しづつ増えている気もしますが(入替わってるだけ?)、その目的は人それぞれかと思います
自分の場合、操縦に対して苦手意識、特に移動と攻撃の同時操作が出来ず、それでも勝つ為ににはどうすれば良いか考えた結果、「電子制御によるアーム特化の操縦アシスト」という結論に至りました
続きを読む
Blogお引越し
意図的ではなかったのですが、ここの所毎週更新していますね
ってことで今週も(ネタは無いので作りました)
先日、「はてなダイアリー」から「はてなブログ」にお引越しました
運営同じなので2,3ボタン押すだけですが、URLと見た目が変わりました
といっても転送されるのでURLは前のままでも大丈夫です
管理しやすくなった他、機能としてはいろいろ増えているみたいなので、面白いサービスがあれば試してみるかもしれないです
コメント来ても気づかないので(標準以外の方法で)お知らせしてくれる何か、とか
ちなみにコメント承認制にしていましたが戻しましたので、暫くはこのまま
コメントやイイね頂けると更新の励みになり、頻度あがる・・・かもしれません笑
さて、来週は本社とホテルに缶詰なので、今週中にKHK杯に向けて臨戦態勢にしなければ…
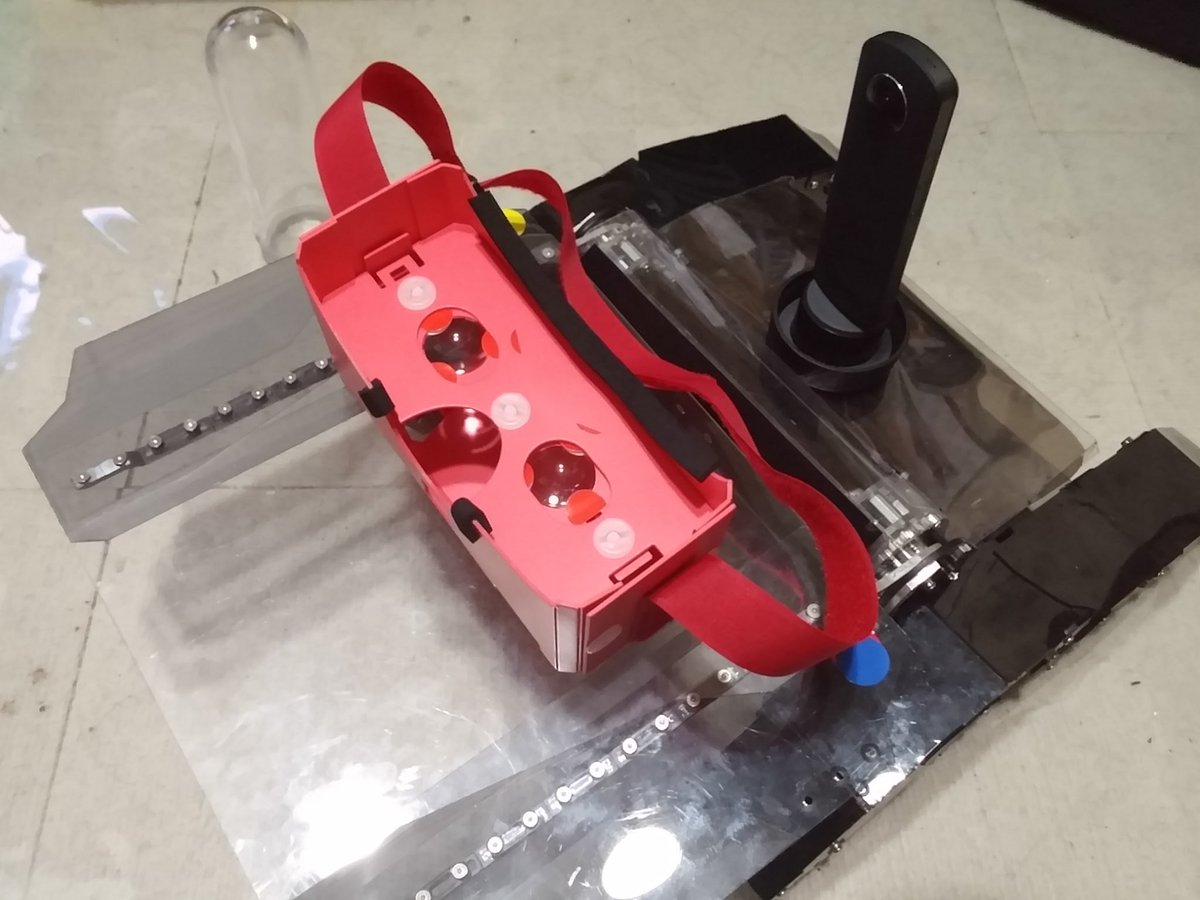
THETA+VRゴーグルによる遠隔操縦テスト
まだ詳細情報無いので何とも言えませんが、かわロボ技術賞に興味は持ってます
遠隔操縦がメインとのことで、手持ちのシステムで試していないことがあり、良い機会なのでやってみました
GoPro+タブレットも持っているので次回比較してみます
条件
走行環境(全天球写真)
ロボ:Leopard、カメラ:THETA S、モニター:VRゴーグル、通信:Wifi
時間:数分、遠隔距離:同一部屋内、走行距離:テーブル一周
動画
自分がVRゴーグルを装着して操縦した動画
(遠隔操縦中はTHETA撮影できないので別カメラから撮影)
↑右下のyoutubeボタンを押して、別タブで御覧ください(ぐるぐるできます)
VRゴーグルを装着しないで、それっぽく同じコースを操縦・THETAで撮影動画
(遠隔操縦中はTHETA撮影できないので再現動画)
結果
フレームレート:10fpsという事前情報程は低くは感じないが、瞬間停止があり不安定
レイテンシ:0.5sec程度?対戦は問題外。低速移動なら可、停止や切返し多いと厳しい
画質:文字が読めない程度に悪いが、色で雰囲気はわかる(同系色だと発見困難)
VR酔い:無し(自分は割りと鈍い方だし、短時間なので参考)
まとめ:低速での移動・障害物認識程度は可能なので、時間を掛けてのB予選作業は可能と思われる
全天球によるメリットがある用途ではなく、GoProの方が適している感じはある
期待していた「ロボットに乗り込んでいる感」は、画質のせいかあまり無かった
併用も良いかもしれないが出力方法が課題(次回比較時に検討予定)