かわロボに制御入れてる方、少しづつ増えている気もしますが(入替わってるだけ?)、その目的は人それぞれかと思います
自分の場合、操縦に対して苦手意識、特に移動と攻撃の同時操作が出来ず、それでも勝つ為ににはどうすれば良いか考えた結果、「電子制御によるアーム特化の操縦アシスト」という結論に至りました
続きを読むかわロボに制御入れてる方、少しづつ増えている気もしますが(入替わってるだけ?)、その目的は人それぞれかと思います
自分の場合、操縦に対して苦手意識、特に移動と攻撃の同時操作が出来ず、それでも勝つ為ににはどうすれば良いか考えた結果、「電子制御によるアーム特化の操縦アシスト」という結論に至りました
続きを読む意図的ではなかったのですが、ここの所毎週更新していますね
ってことで今週も(ネタは無いので作りました)
先日、「はてなダイアリー」から「はてなブログ」にお引越しました
運営同じなので2,3ボタン押すだけですが、URLと見た目が変わりました
といっても転送されるのでURLは前のままでも大丈夫です
管理しやすくなった他、機能としてはいろいろ増えているみたいなので、面白いサービスがあれば試してみるかもしれないです
コメント来ても気づかないので(標準以外の方法で)お知らせしてくれる何か、とか
ちなみにコメント承認制にしていましたが戻しましたので、暫くはこのまま
コメントやイイね頂けると更新の励みになり、頻度あがる・・・かもしれません笑
さて、来週は本社とホテルに缶詰なので、今週中にKHK杯に向けて臨戦態勢にしなければ…
まだ詳細情報無いので何とも言えませんが、かわロボ技術賞に興味は持ってます
遠隔操縦がメインとのことで、手持ちのシステムで試していないことがあり、良い機会なのでやってみました
GoPro+タブレットも持っているので次回比較してみます
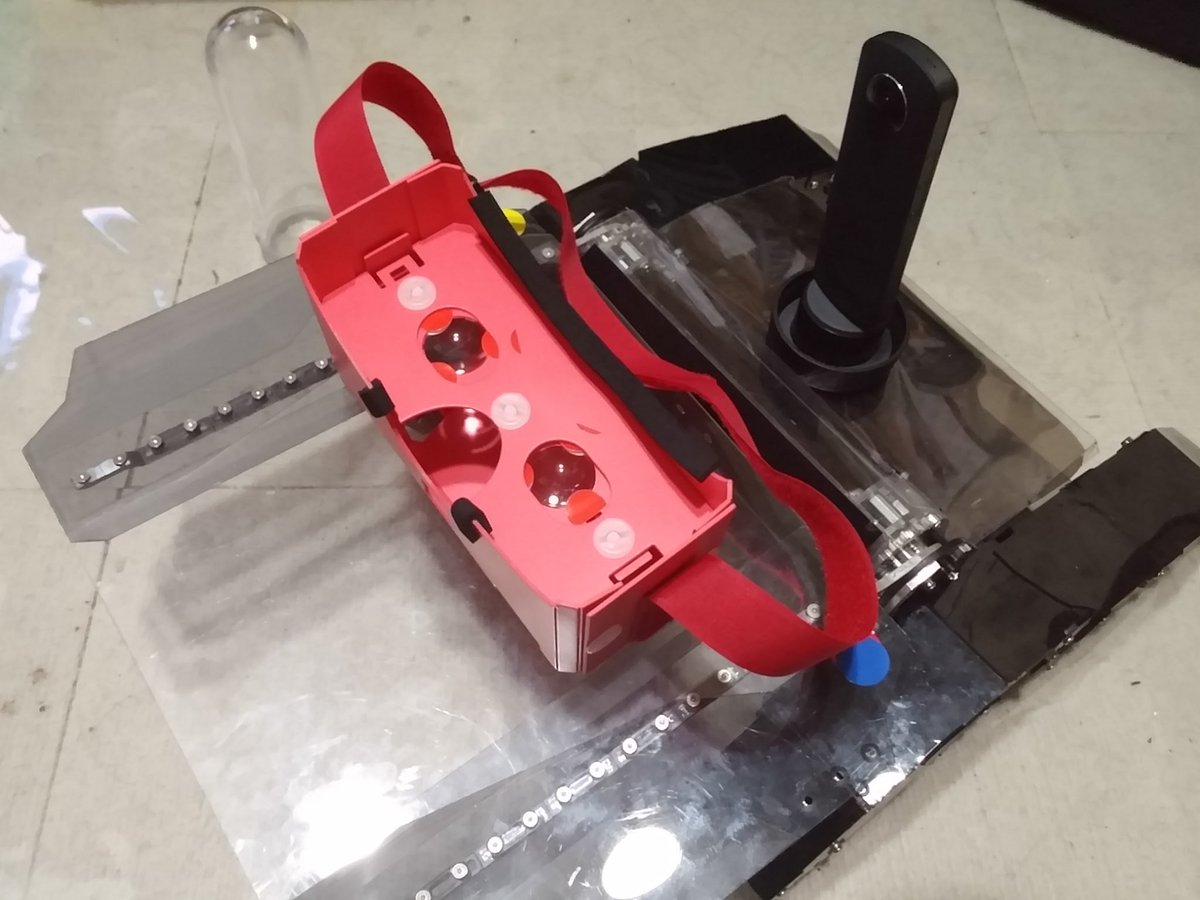
走行環境(全天球写真)
ロボ:Leopard、カメラ:THETA S、モニター:VRゴーグル、通信:Wifi
時間:数分、遠隔距離:同一部屋内、走行距離:テーブル一周
自分がVRゴーグルを装着して操縦した動画
(遠隔操縦中はTHETA撮影できないので別カメラから撮影)
↑右下のyoutubeボタンを押して、別タブで御覧ください(ぐるぐるできます)
VRゴーグルを装着しないで、それっぽく同じコースを操縦・THETAで撮影動画
(遠隔操縦中はTHETA撮影できないので再現動画)
フレームレート:10fpsという事前情報程は低くは感じないが、瞬間停止があり不安定
レイテンシ:0.5sec程度?対戦は問題外。低速移動なら可、停止や切返し多いと厳しい
画質:文字が読めない程度に悪いが、色で雰囲気はわかる(同系色だと発見困難)
VR酔い:無し(自分は割りと鈍い方だし、短時間なので参考)
まとめ:低速での移動・障害物認識程度は可能なので、時間を掛けてのB予選作業は可能と思われる
全天球によるメリットがある用途ではなく、GoProの方が適している感じはある
期待していた「ロボットに乗り込んでいる感」は、画質のせいかあまり無かった
併用も良いかもしれないが出力方法が課題(次回比較時に検討予定)
今年は予選落ちでした
くじ運もあるので一概には言えませんが、少なくとも優勝・上位入賞できる実力がなかったのは確かです
マシンの原型は5月末の大同杯に完成、7月中旬のじま杯には本大会に出れる状態でしたが、その後本大会直前まで家庭の事情でマシンに触れられず、じま杯でテストしたフォークシールドに小慣れていない状態のまま本大会参戦となりました
まぁ本大会直前も時間を捻出しようと思えば出来なくは無かったので、早めにマシン作りすぎて中弛みしたというのも事実ですね
去年のヤガボットでもありましたが、専守防衛対策が不十分(フォークがそのつもりだったが運用不足)で時間ギリギリになって飛び込んで負けました
ただ頂いた動画をよく見てみると、そこまで専守防衛という訳でもなく、自分が攻めるタイミングは何度かあったのに逃しているだけですね・・・
フォークシールドは面白いアイディアだったので是非本大会でも披露したいという思いが邪魔して、不十分な準備のまま使うことになり、判断を鈍らせました
最後は、たぶん前進入力後に旋回した筈が、山に引っかかるか故障かで前進できず旋回だけして脱輪してますね(両方無いとは思うのですが・・・)
モータ出力強化とフォークシールド練度UP 〜KHK杯
距離センサ再配置とフォークシールド連動制御 〜高専祭
新基板(BT、I2C、フルカラーLED対応)設計・製作 〜来季
